很多文章的报道都是由微观而宏观,今日小编讲给大家带来的关于通过分析图像估算表面的触觉特性的模型的资讯也不例外,希翼可以在一定的程度上开阔你们的视野!y有对通过分析图像估算表面的触觉特性的模型这篇文章感兴趣的小伙伴可以一起来看看
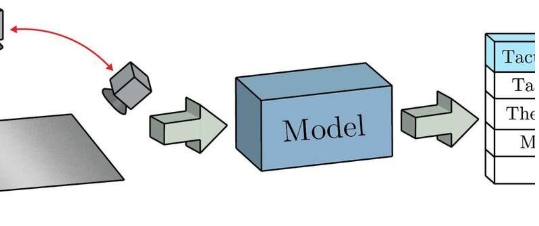
基于先前的研究,马修·普里(Matthew Purri)博士罗格斯大学(Rutgers University)的计算机视觉和人工智能专业的学生最近开辟了基于卷积神经网络(CNN)的模型,该模型可以通过分析表面图像来估量表面的触觉特性。Purri的新论文预先发表在arXiv上,由Rutgers电气工程教授Kristin Dana监督。
Purri告诉TechXplore:“我以前的研究涉及从卫星图像中进行细粒度的材料分割。”“卫星图像序列以不同的视角和照明角度以及多光谱信息的形式提供了有关场景的大量物质信息。我们从以前的工作中了解到有价值的多视点信息对于识别材料是多么重要,并相信该信息可以起到物理表面性质估量问题的线索。”
Dana和Rutgers的其他研究人员以前曾尝试开辟一种技术,该技术可根据反射盘图像来估量表面的摩擦系数。一种特定类型的图像,显示多少表面或材料能够反射辐射能。Purri在他的论文中着手进一步开辟此方法,以便可以从RGB图像估量更多的物理属性。
Purri解释说:“这个新项目的目的是仅通过视觉信息来估量表面的众多物理特性,例如摩擦和柔韧性。”“我们与创建名为Toccare的触觉传感器的公司SynTouch合作,该公司可测量表面的各种触觉物理特性。在我们的arXiv论文中,我们探讨了从单个图像和多个图像估量这些特性的可能性。 。”
Purri和Dana在他们的研究中探究的另一个问题是,拍摄不同输入图像的角度是否会影响他们的神经网络估量表面物理特性的程度。但是,研究人员设计了一个模型,可以自动学习最佳的视角组合以及理想的神经网络参数,而不是手动选择不同的视角。
“我们模型的一个目标是学习一种功能,该功能可以将表面图像(视觉信息)和触觉物理特性信息分别投影到一个共享的子空间中,在该子空间中,视觉触觉信息对非常接近,而不同的视觉触觉对却相距遥远”,Purri说。“为实现这一目标,如果在子空间中分开投影的视觉-触觉对相距遥远,该模型将受到惩处。”
Purri和Dana设计的技术还尝试根据辅助分类目标,识别视觉和触觉特性与其他视觉对相似的视觉对。然后,它通过称为视觉-触觉特征聚类的过程生成新的分类标签。
Purri说:“我们模型的另一个目标是从视觉信息中估量物理性质。”“共同学习的功能会接收预计的视觉信息并估量一个或多个物理属性。我们通过在模型的这一部分中包含对抗性目标,提高了评估性能。物理属性估量与输入的视觉信息相结合,实质上是在欺骗区分函数认为这是真实的物产价值。”
Purri和Dana在一系列实验中评估了其基于CNN的模型,以评估表面的物理性质,并发现其表现出色。实际上,仅通过分析表面图像,他们的模型就可以识别其许多物理性质。
研究人员设计的新模型可能具有许多有趣的应用。首先,它可以使机器人系统更好地了解周围物体和表面的关键特征,从而使其更有效地与它们交互并更轻松地导航新环境。
此外,研究人员介绍了一种方法,该方法可以自动计算最佳成像角度组合,以训练模型来估量物体的物理特性。将来,他们确定的最佳组合可以为针对特定任务(例如工厂的质量操纵)量身定制的传感器提供信息。
Purri补充说:“在我们研究的第一阶段,我们已经展示了如何从视觉信息中学习物理特性。”“我们的下一个目标是利用我们获得的见解来提高涉及精确对象控制的任务的模型性能。”
